Jumanji Rover
Contact Infrastructure Provider
Summary
- country: IT
- Offered by: FBK
- Show in google maps
Description


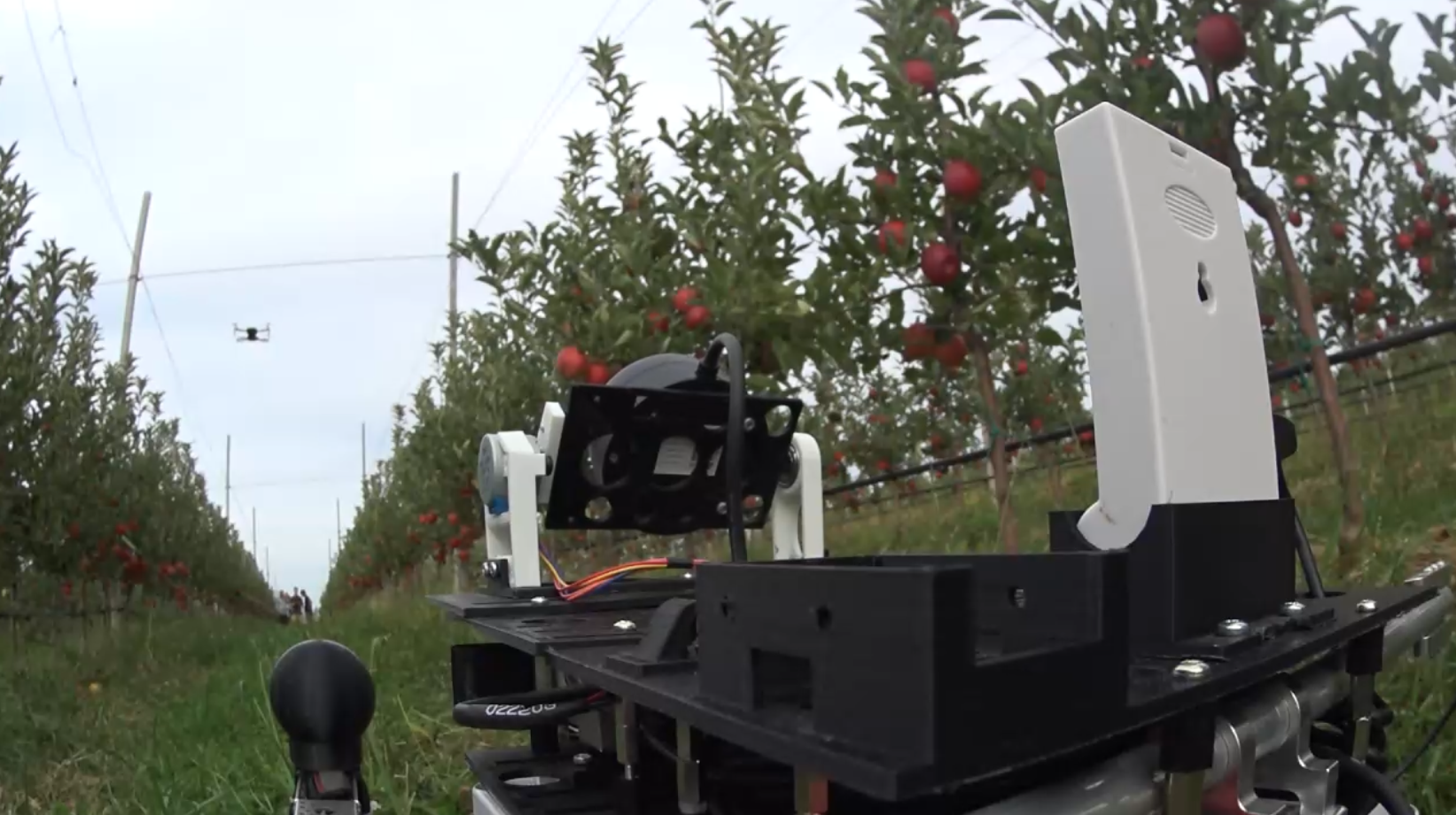
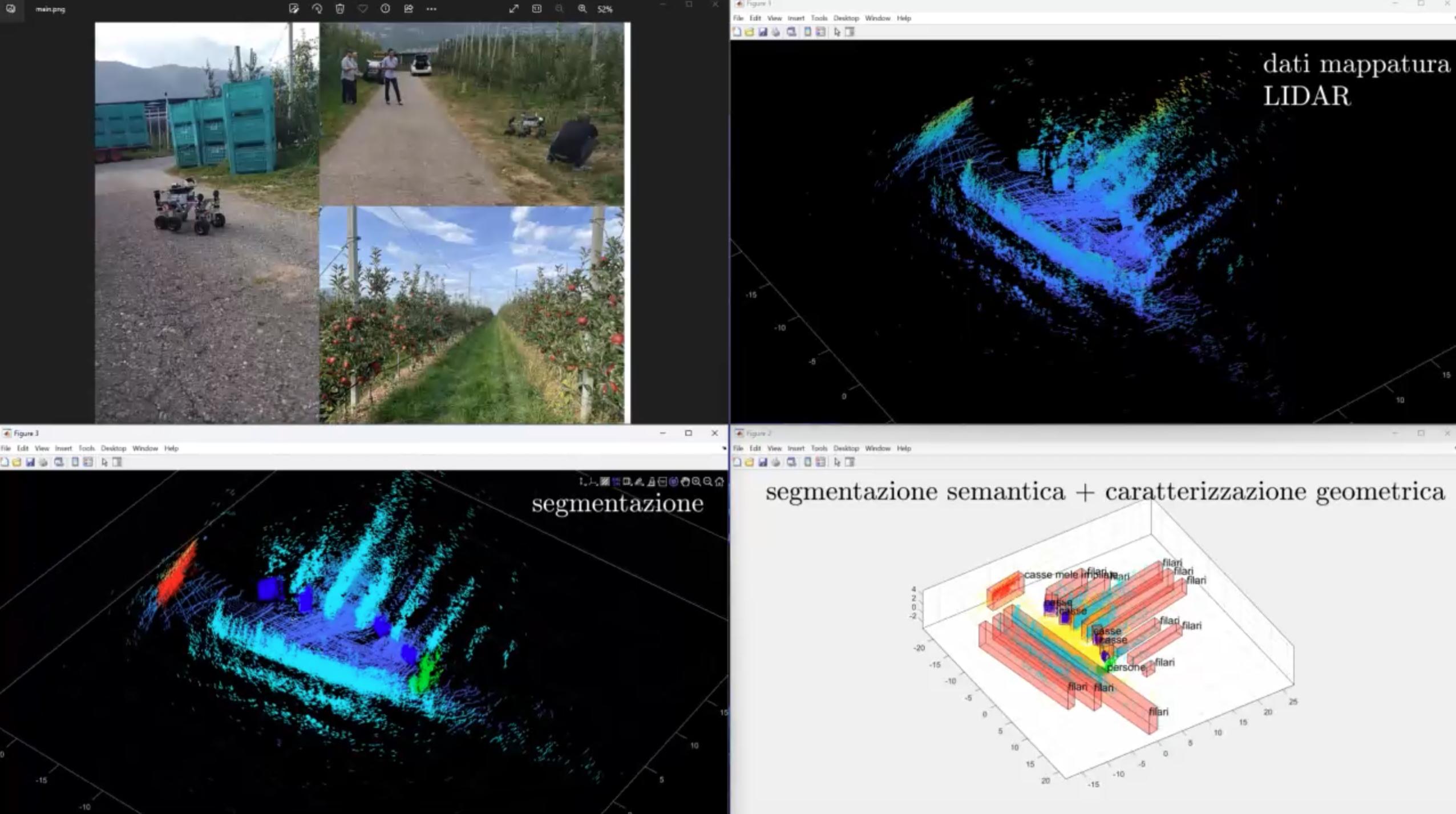

Using robotics as an autonomous crop-field monitoring system is a cost-effective solution for acquiring different images (e.g., RGB and infrared) and for supporting field experimentation with specific environmental data. Furthermore, the onboard autonomous intelligence helps optimize the robotic sensing activity by pre-processing the collected data, and deciding the navigation paths based on information such as visual markers (e.g., aruco/fiducial markers). However, a generic and cost-effective robotic solution autonomously navigating a rugged outdoor environment is still an open issue. Given these challenges, the OpenioT research group proposes to develop a ROS-based rover, based on existing open-source projects, to navigate and acquire images using a camera mounted on a 4 DoF robotic arm. This solutions will be used for benchmarking 3rd party solutions in the context of AgrifoodTEF service delivery.
The goal of this project is to develop ROS modules that allow the JPL Open Source Rover (a 6-wheeled ROS-compatible mobile robot) to autonomously execute a pre-programmed trajectory (based on waypoints) and collect data using a camera (or other sensors) mounted on the 4 DoF arm, optimizing the pose of the robot arm and the robot.